 Apollo 核心模块
Apollo 核心模块
# Apollo 核心模块
# 01、定位
默认情况下定位模块有两种方法,一种是结合 GPS 以及 IMU 信息的 RTK (Real Time Kinematic 实时运动)方法,另一种是融合 GPS、IMU 以及 激光雷达信息的多传感器融合方法。
# 1.1 定位模块输入介绍
- RTK方法的输入是
- GPS - 全球定位系统
- IMU - 惯性测量单元
- 多传感器融合定位方法的输入是
- GPS - 全球定位系统
- IMU - 惯性测量单元
- 激光雷达 - 光探测与测距传感器
# 1.2 定位模块输出介绍
- 一个
LocalizationEstimate实例
# 02、感知
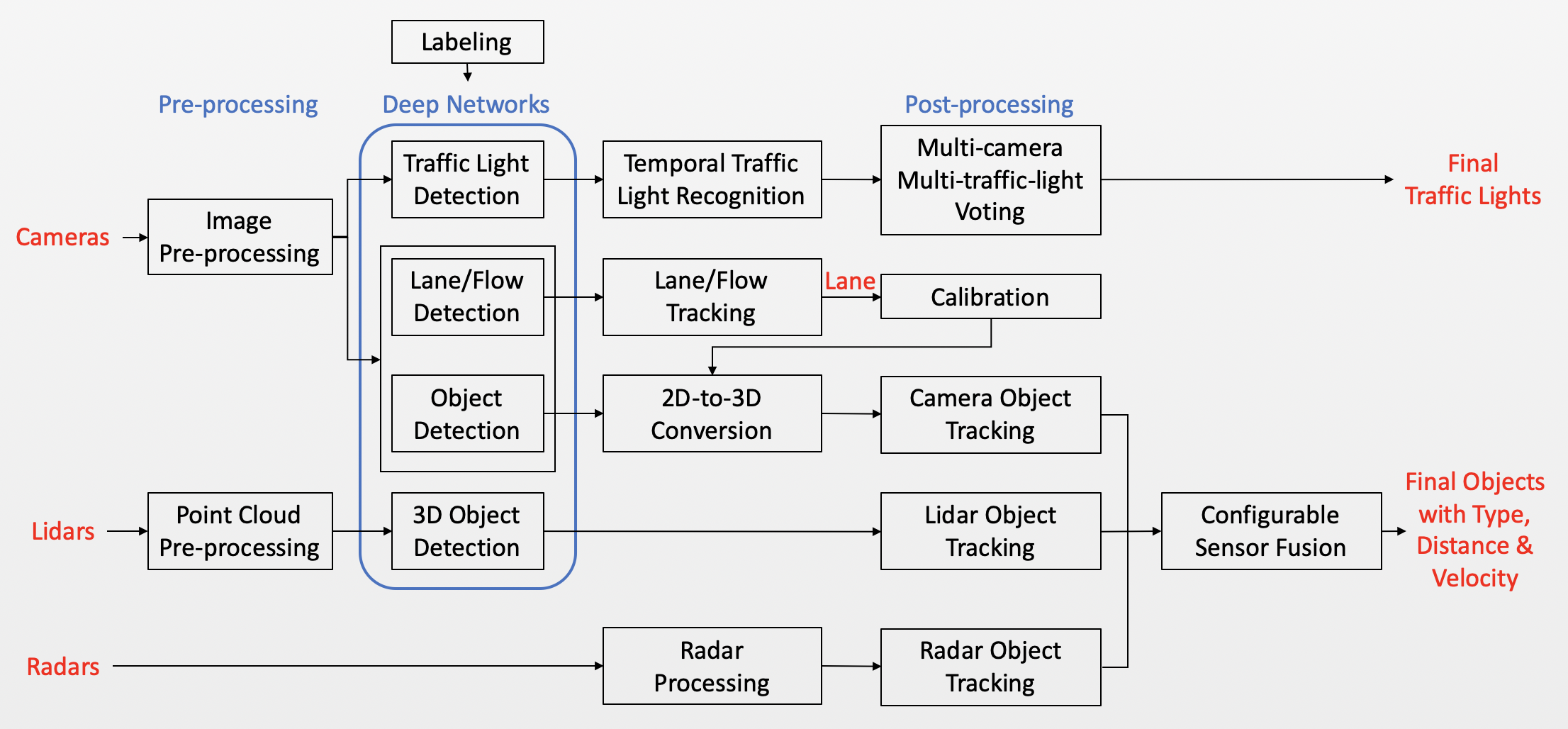
感知模块用于检测和分类障碍物,其在检测组件中实现。感知模块与多相机、雷达以及激光雷达协作识别障碍物,以及融合他们各自的轨迹以获得最终的轨迹。障碍物子模块检测、分类以及跟踪障碍物,这个子模块也预测障碍物的运动以及姿态信息。对于车道线,通过对车道进行像素级别的解析的后处理来构建车道实例,并且计算车道与本车的相对位置。
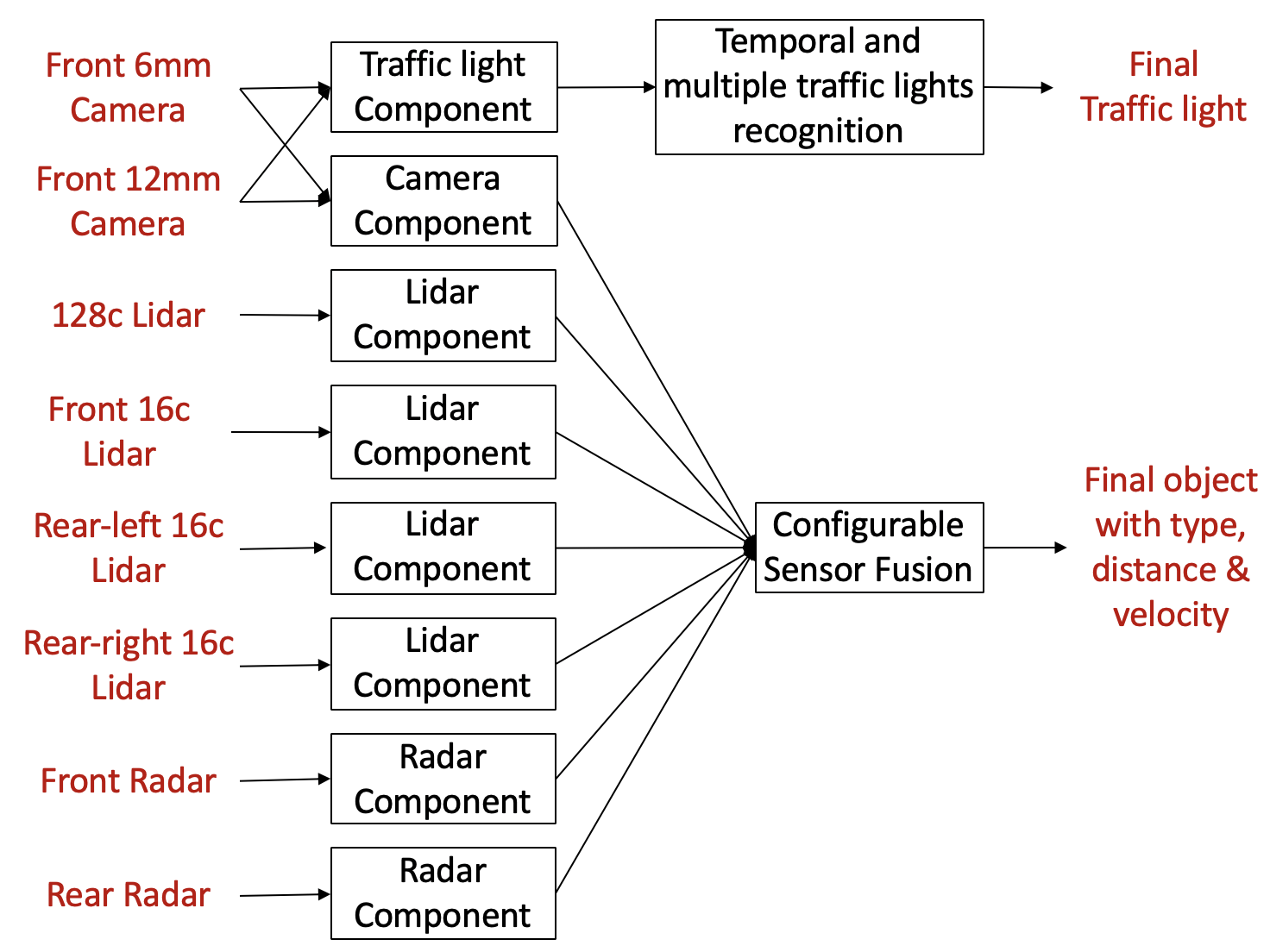
# 2.1、定位模块输入介绍
- 128 通道的 LiDAR 数据 (cyber channel /apollo/sensor/velodyne128)
- 16 通道的 LiDAR 数据 (cyber channel /apollo/sensor/lidar_front, lidar_rear_left, lidar_rear_right)
- Radar 数据 (cyber channel /apollo/sensor/radar_front, radar_rear)
- 图像数据 (cyber channel /apollo/sensor/camera/front_6mm, front_12mm)
- 雷达传感器标定的外参 (from YAML files)
- 前置摄像头标定的内参和外参 (from YAML files)
- 本车的速度和角速度 (cyber channel /apollo/localization/pose)
# 2.2、定位模块输出介绍
- 障碍物的 3D 轨迹,并且带有朝向,速度以及分类信息 (cyber channel /apollo/perception/obstacles)
- 交通信号灯的检测识别输出 (cyber channel /apollo/perception/traffic_light)
上次更新: 2021/08/17, 18:07:06
- 02
- README 美化05-20
- 03
- 常见 Tricks 代码片段05-12