 自动驾驶简介
自动驾驶简介
# 01、从L0-L5的分类
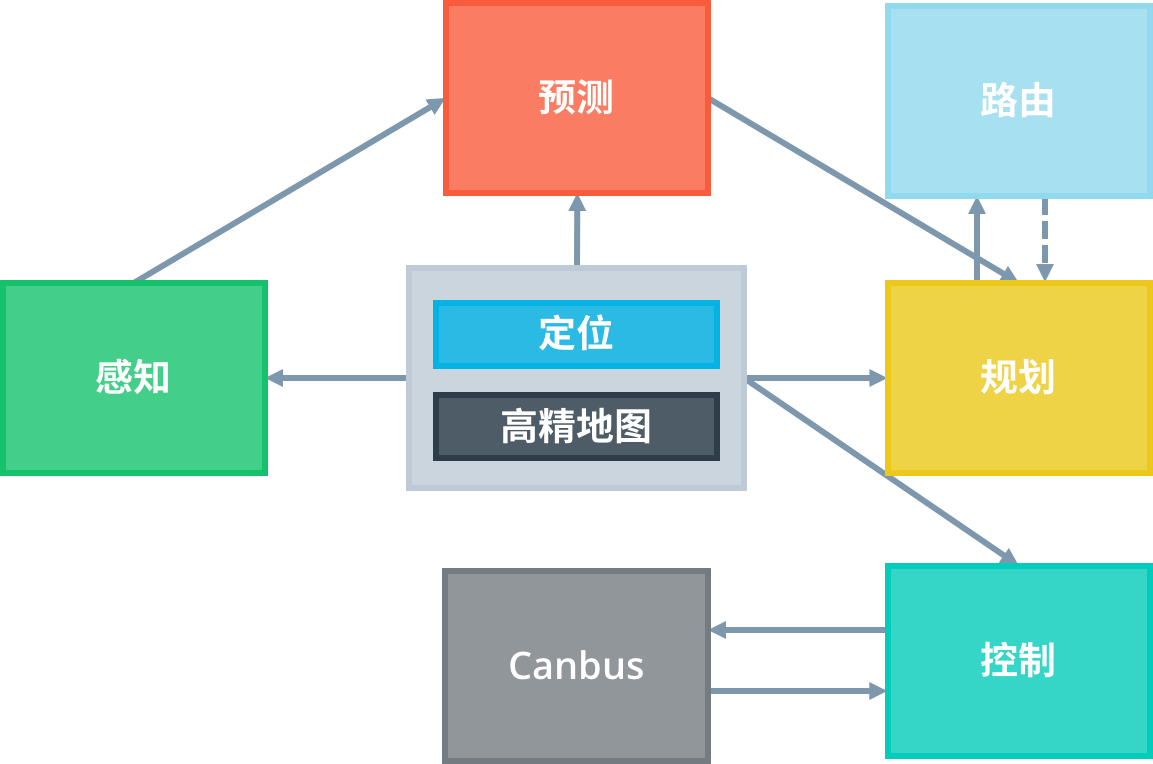
# 02、自动驾驶的各个模块
03、参考车辆以及硬件平台
线控驾驶车辆
传感器参数由参考硬件规格定义
控制器区域网络(Controller Area Network or CAN)是车辆的内部通信网络
GPS 获取位置,IMU 测量车辆的运动和位置
雷达的优势在于便宜,并且适用于各种天气和照明条件,其特别擅长测量其他车辆的速度
开源软件栈
实时操作系统(RTOS):确保在给定时间内完成任务
- Apollo RTOS 是 Ubuntu OS + Apollo kernel
运行时框架:是 ROS (Robot Operating System)的定制版
应用程序模块层:MAP引擎、定位模块、感知模块、规划、控制、人机接口等等
云服务
云服务可以提供 HD Map,Simulation,Data Platform,Security,OTA,DuerOS
仿真场景数据:记录场景以及虚拟场景
Traffic Lights Data、Obstacles with bbox、Segmentation Data
ApolloScape Dataset 最复杂又最精确的无人驾驶数据集
上次更新: 2021/08/17, 18:07:06
- 02
- README 美化05-20
- 03
- 常见 Tricks 代码片段05-12